
[Engineering] 솔리드웍스에서 로보체인 구현하기
업데이트:
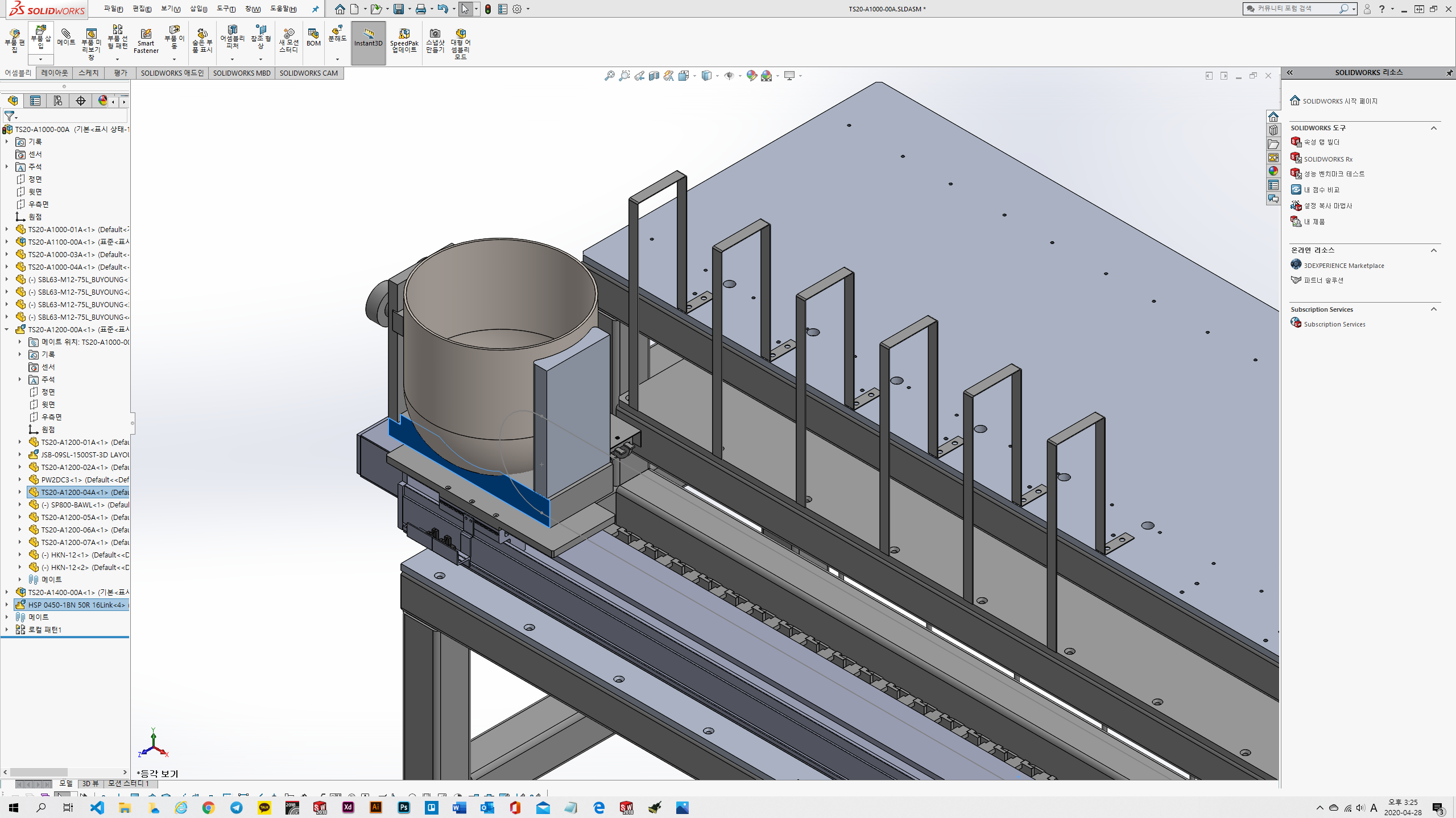
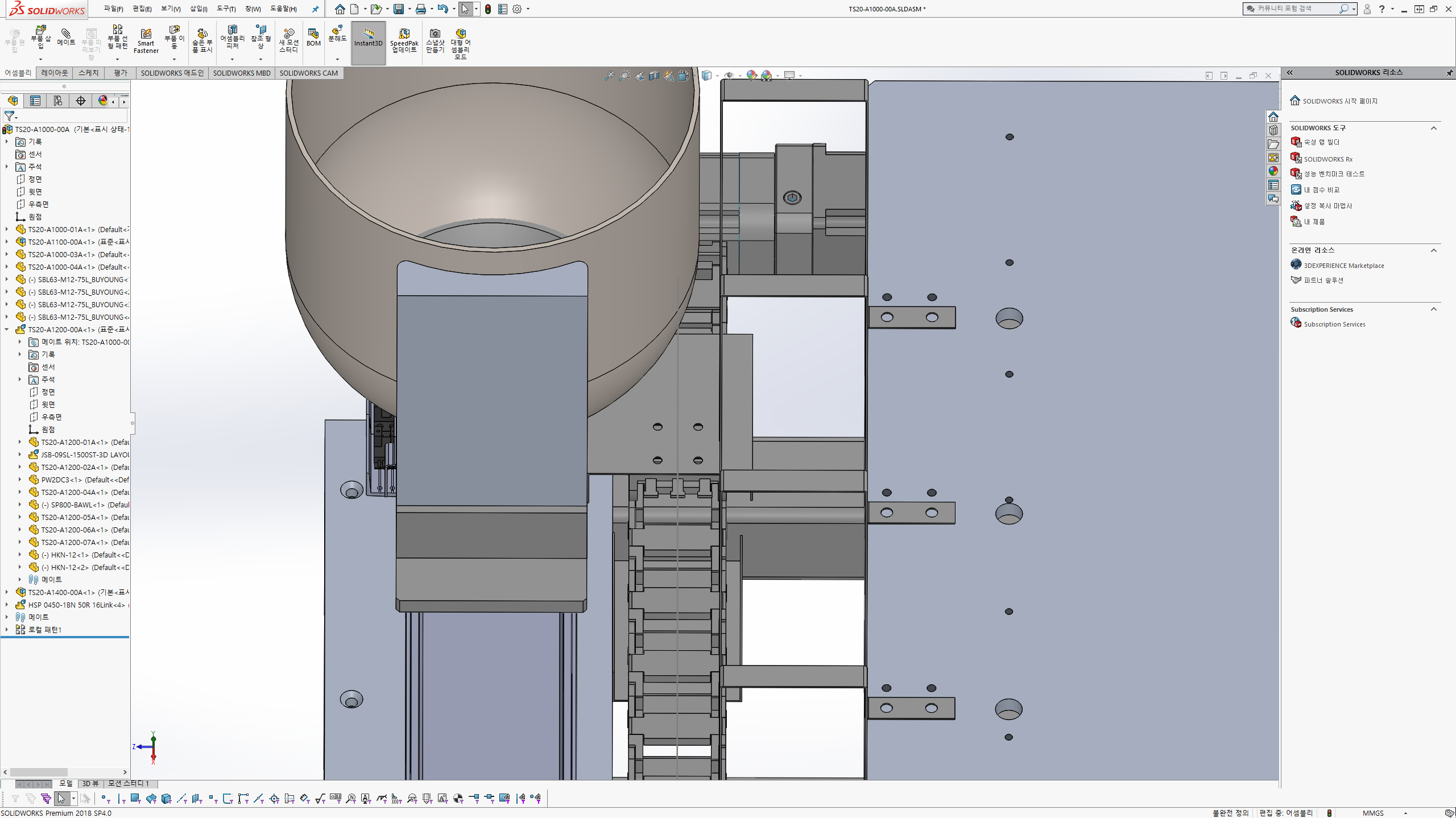
1. 설치될 장비 확인하기
로보체인이 장착될 장비를 살펴봅니다.
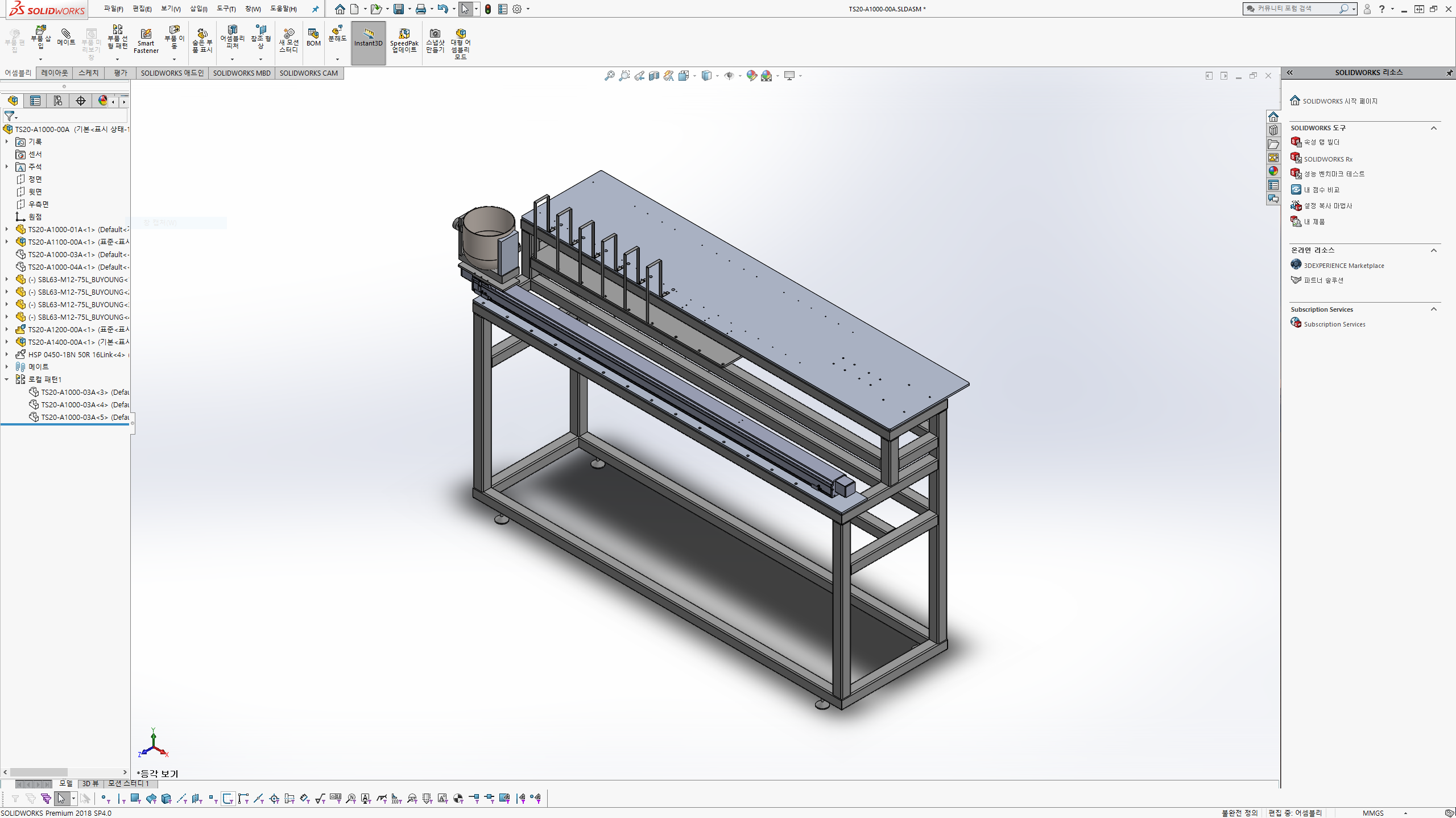
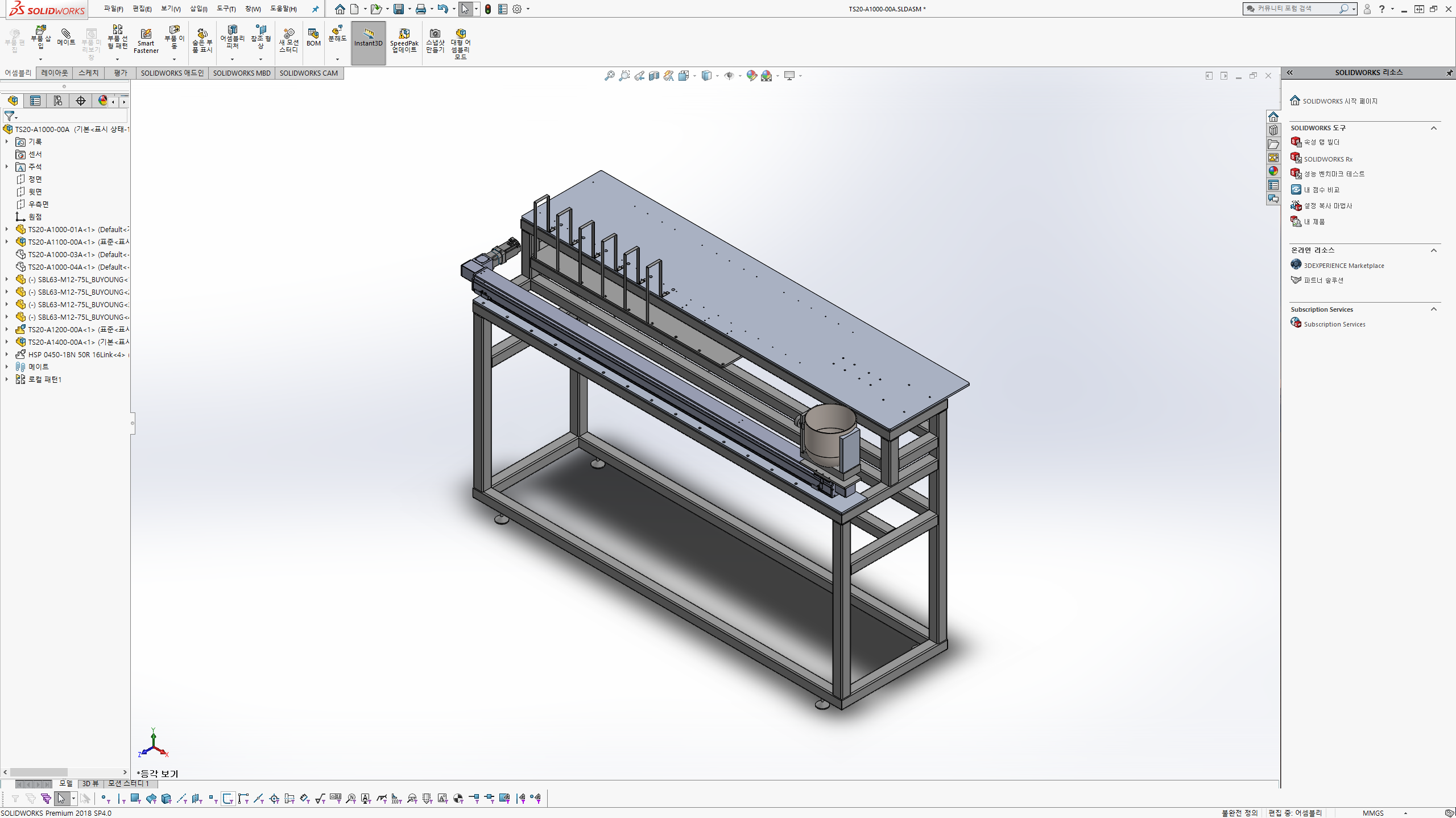
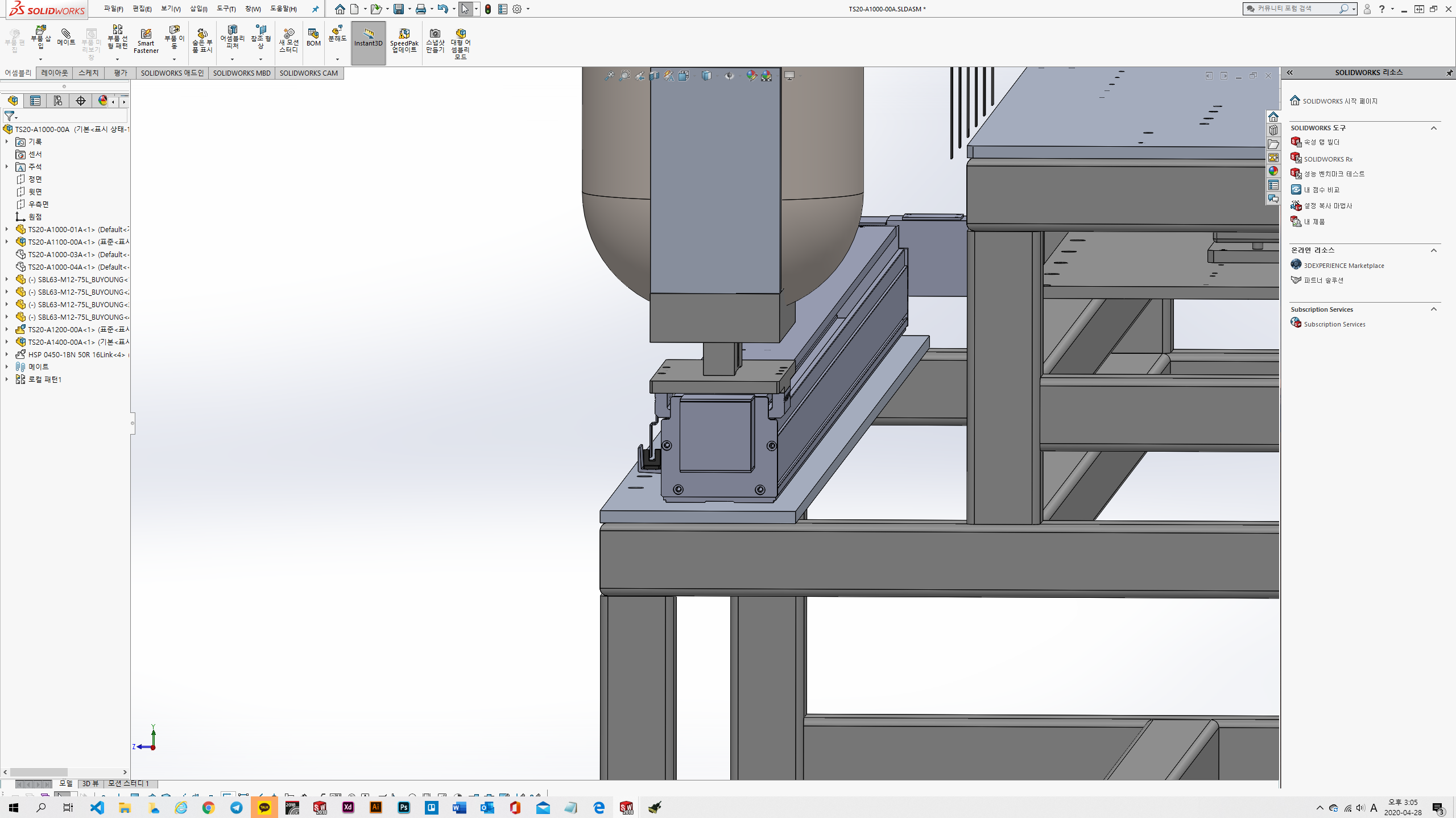
로보체인은 상하좌우로 움직이는 자동화기기에 전력이나 유압을 공급하기 위해 연결한 전선과 호스를 감싸는 특수 체인입니다.
이 장비는 좌우로 움직이는 로봇위의 그릇의 케이블을 감싸야 하기 때문에 로보체인을 사용합니다.
2. 로보체인 선정하기
보통 로보체인은 한신체인이라는 업체에서 구매하여 사용합니다. 한신체인의 홈페이지에 들어가 로보체인을 살펴봅시다.
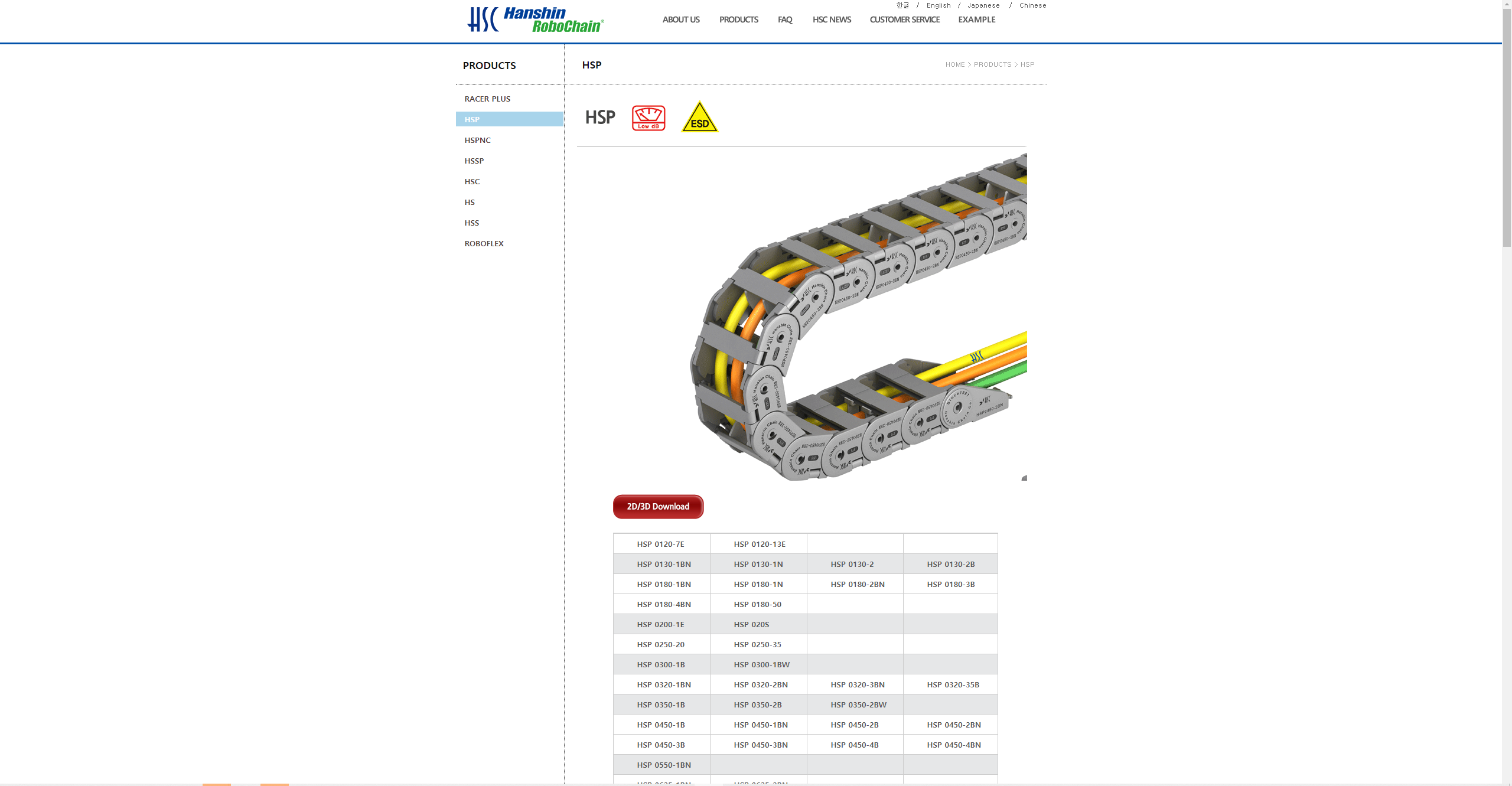
필요한 케이블의 크기와 개수를 참고하여 로보체인을 선정하였습니다.
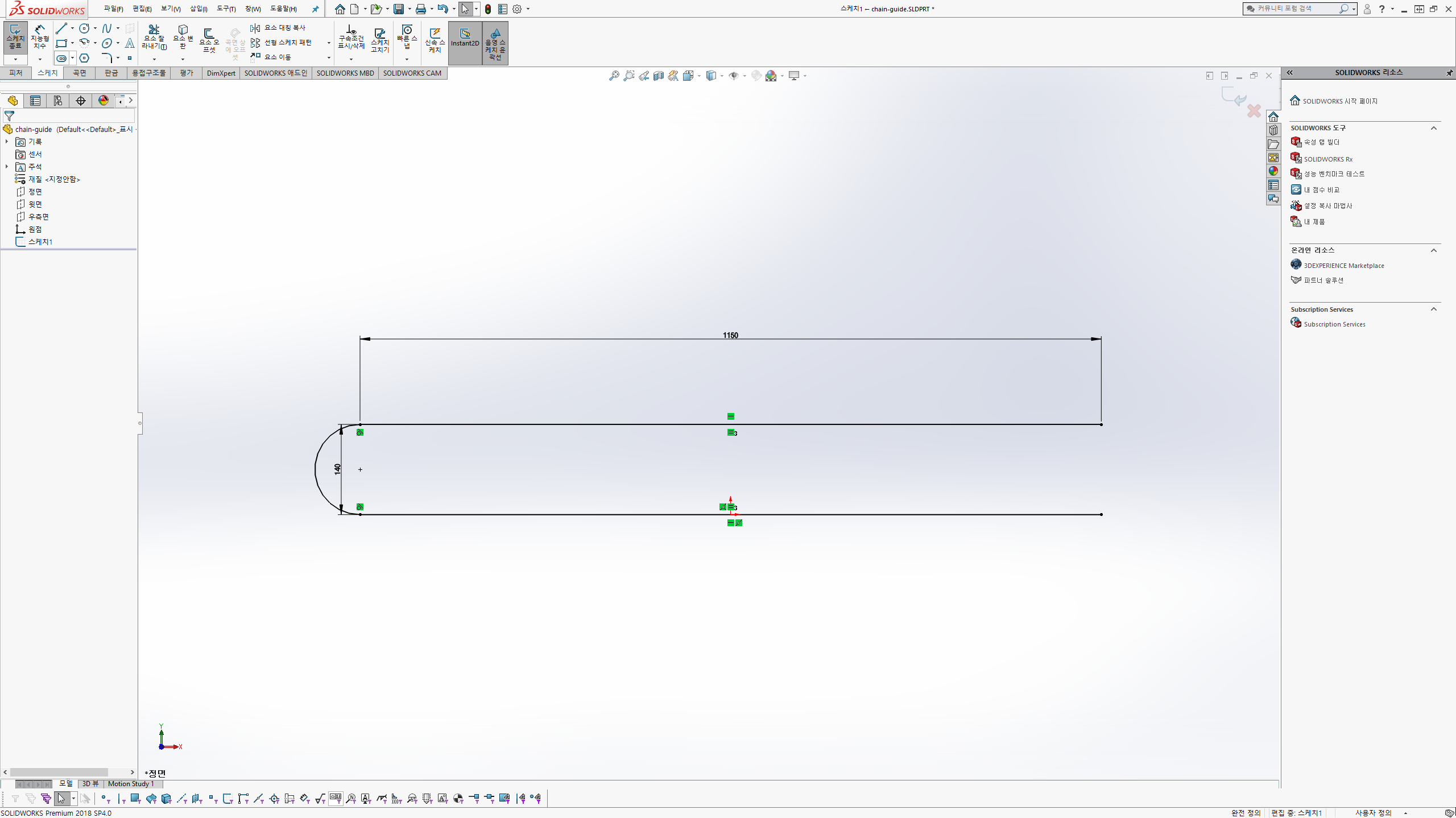
3. 로보체인 경로 스케치하기
로보체인이 움직이는 경로를 스케치로 그려줍니다.
일반적인 상황에서는 로보체인을 중심에 놓기 때문에 길이의 1/2 + 곡률로 지정합니다
4. 로보체인 3D 파일 확인하기
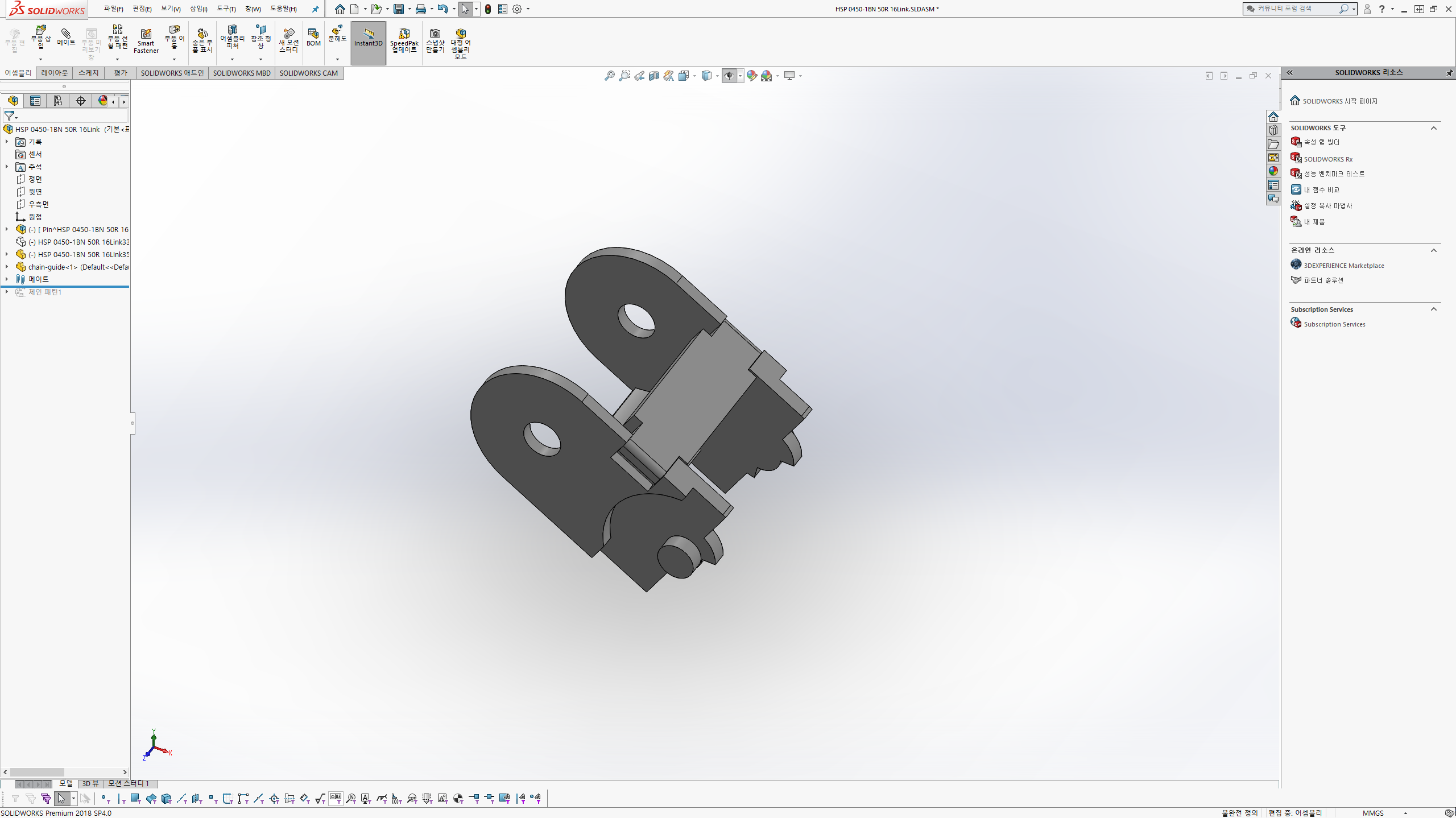
홈페이지에서 다운로드한 로보체인의 모델링에서 부품별로 개별파트를 만들어 저장합니다.
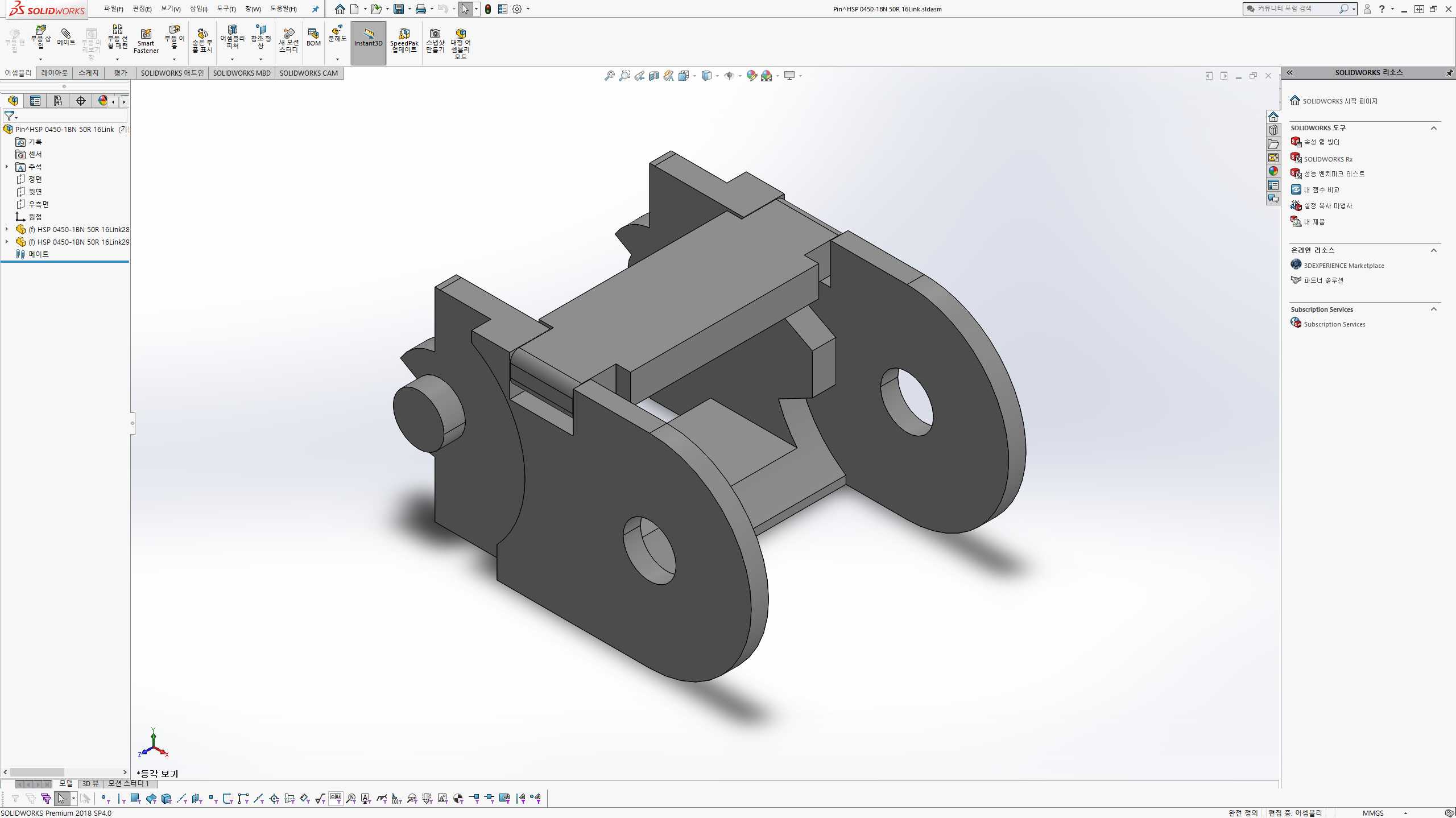
5. 로보체인 어셈블리 만들기
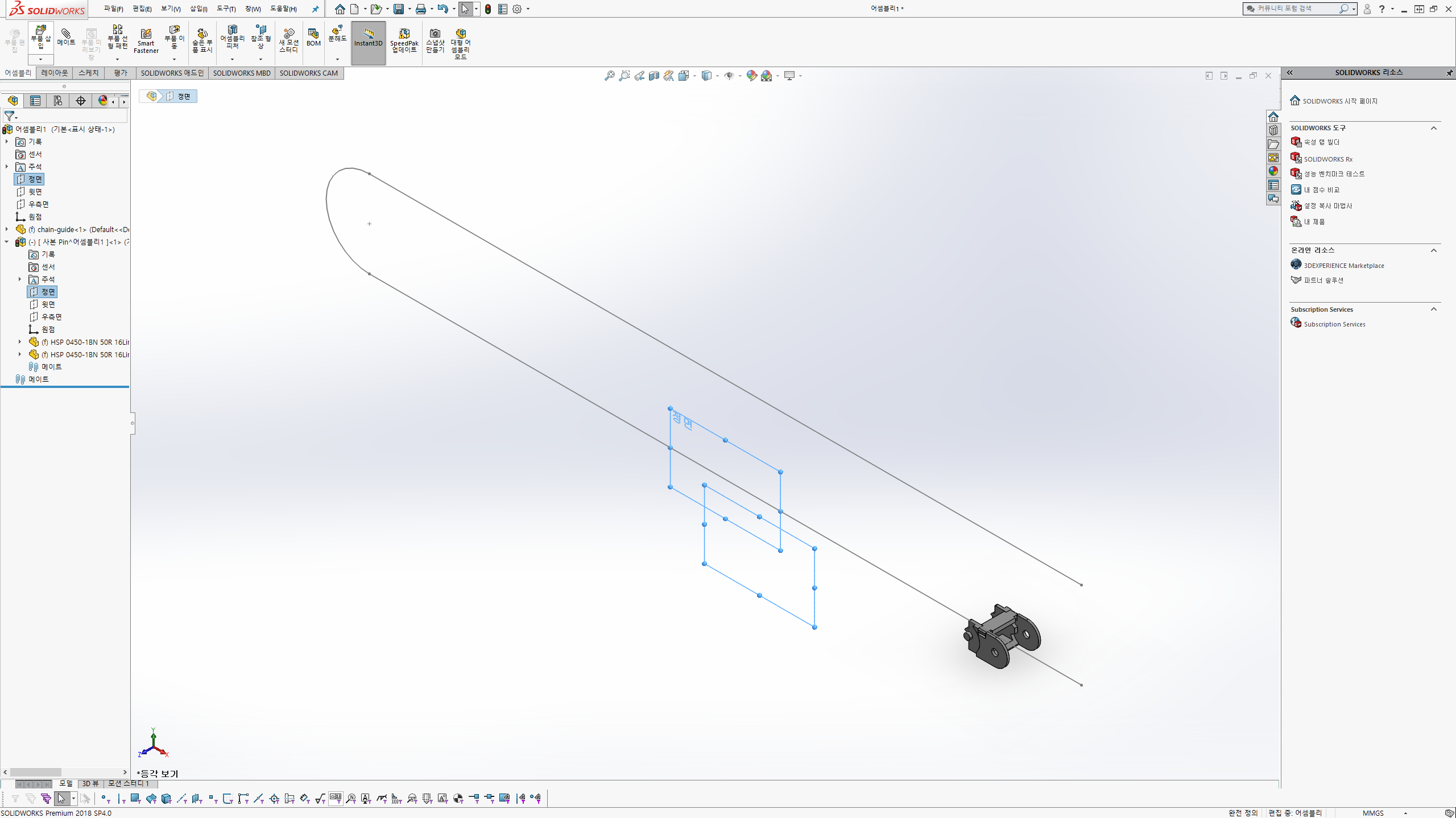
로보체인과 경로의 정면을 일치시켜 로보체인의 중심에 경로가 올 수 있도록 합니다.
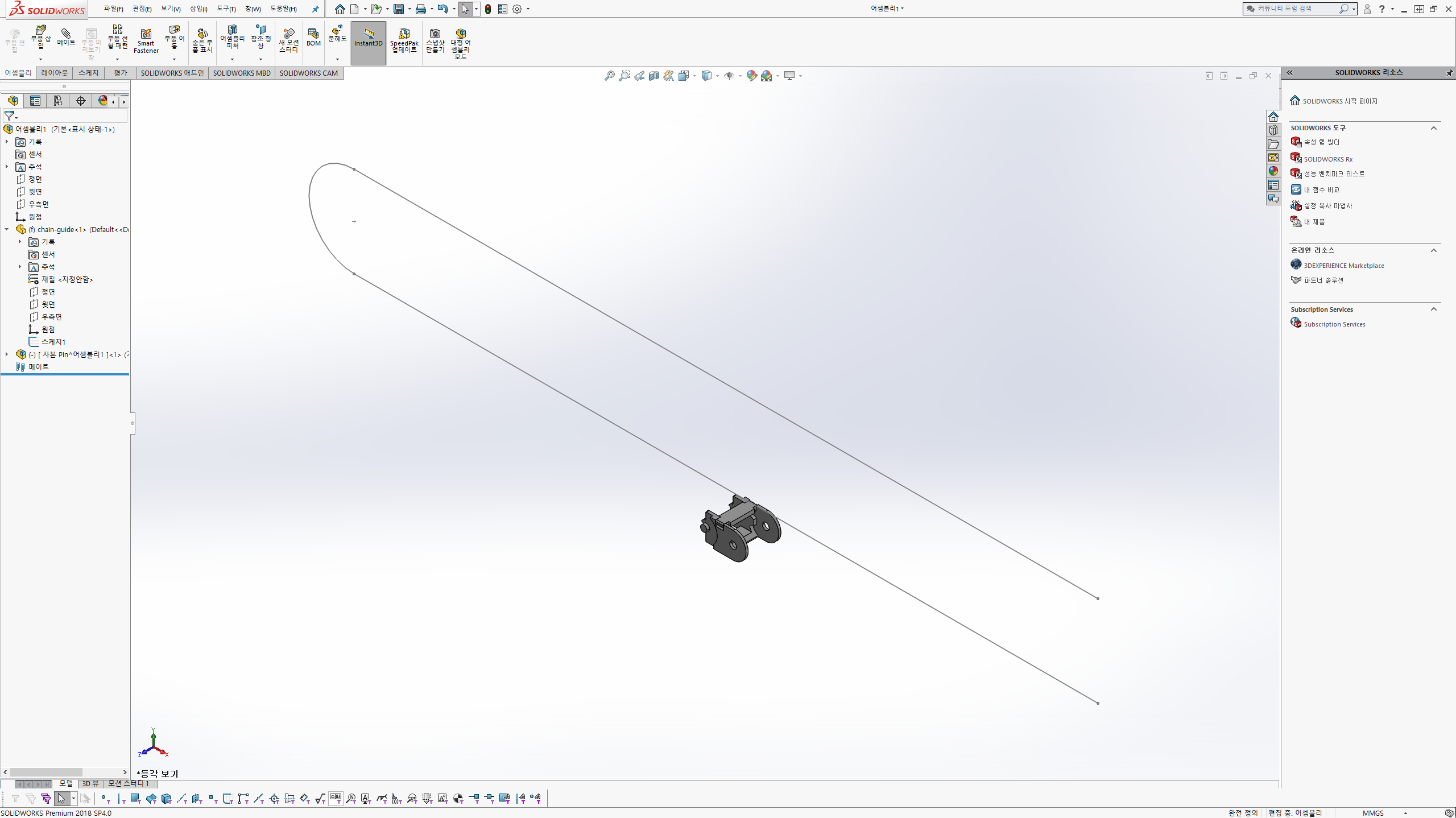
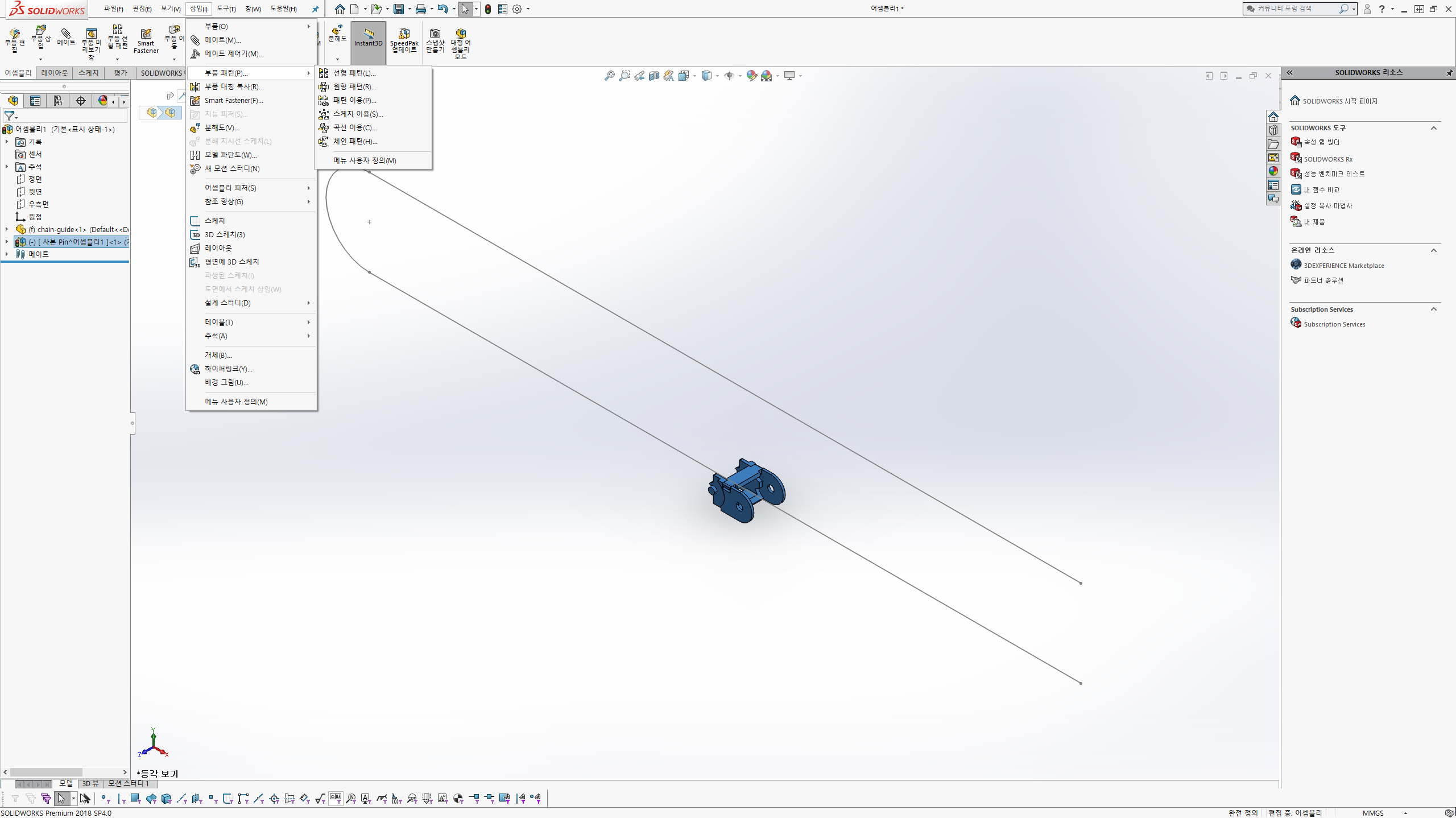
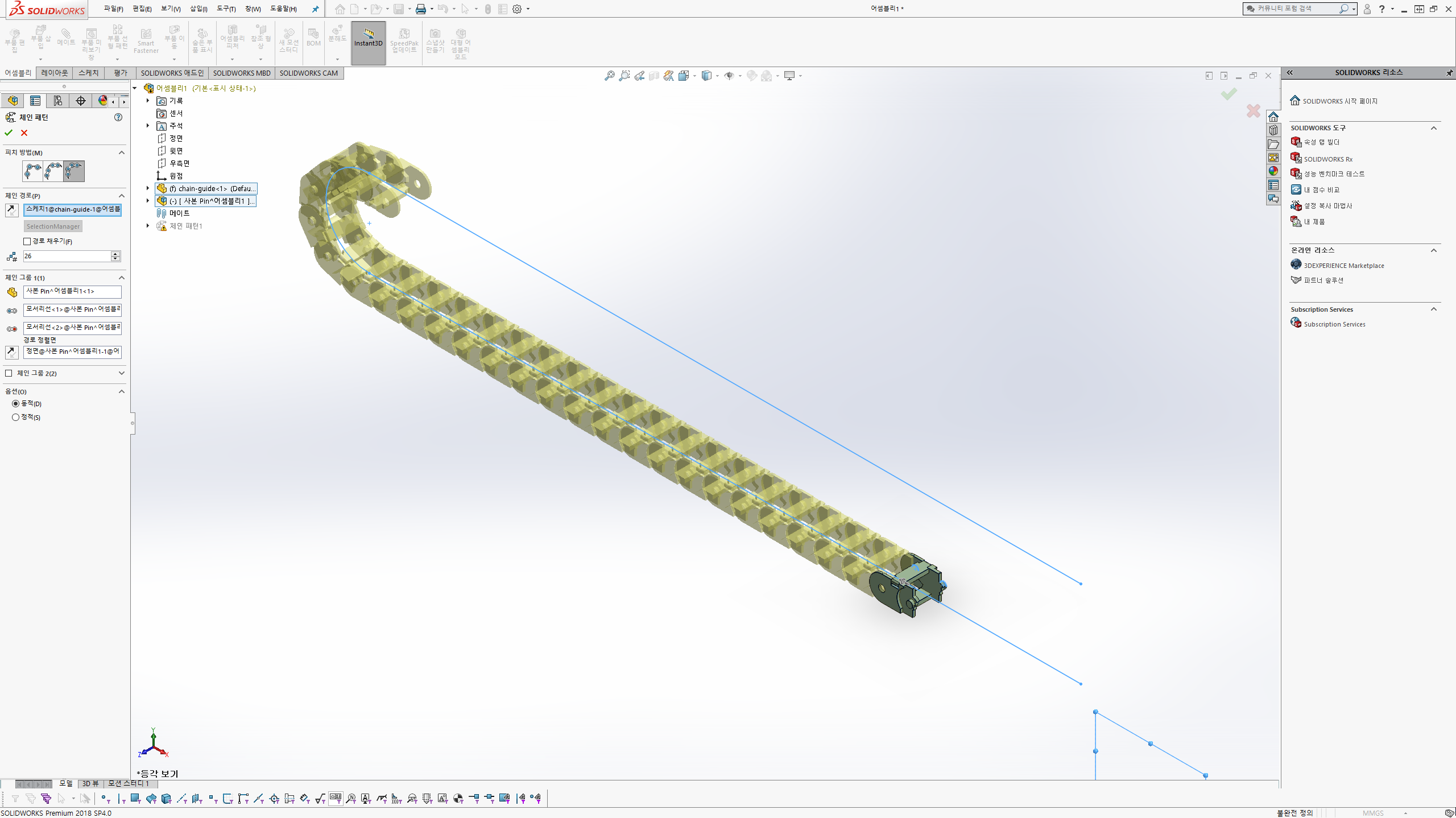
6. 체인패턴을 이용하여 로보체인 패턴 만들기
삽입/부품패턴/체인패턴을 선택합니다.
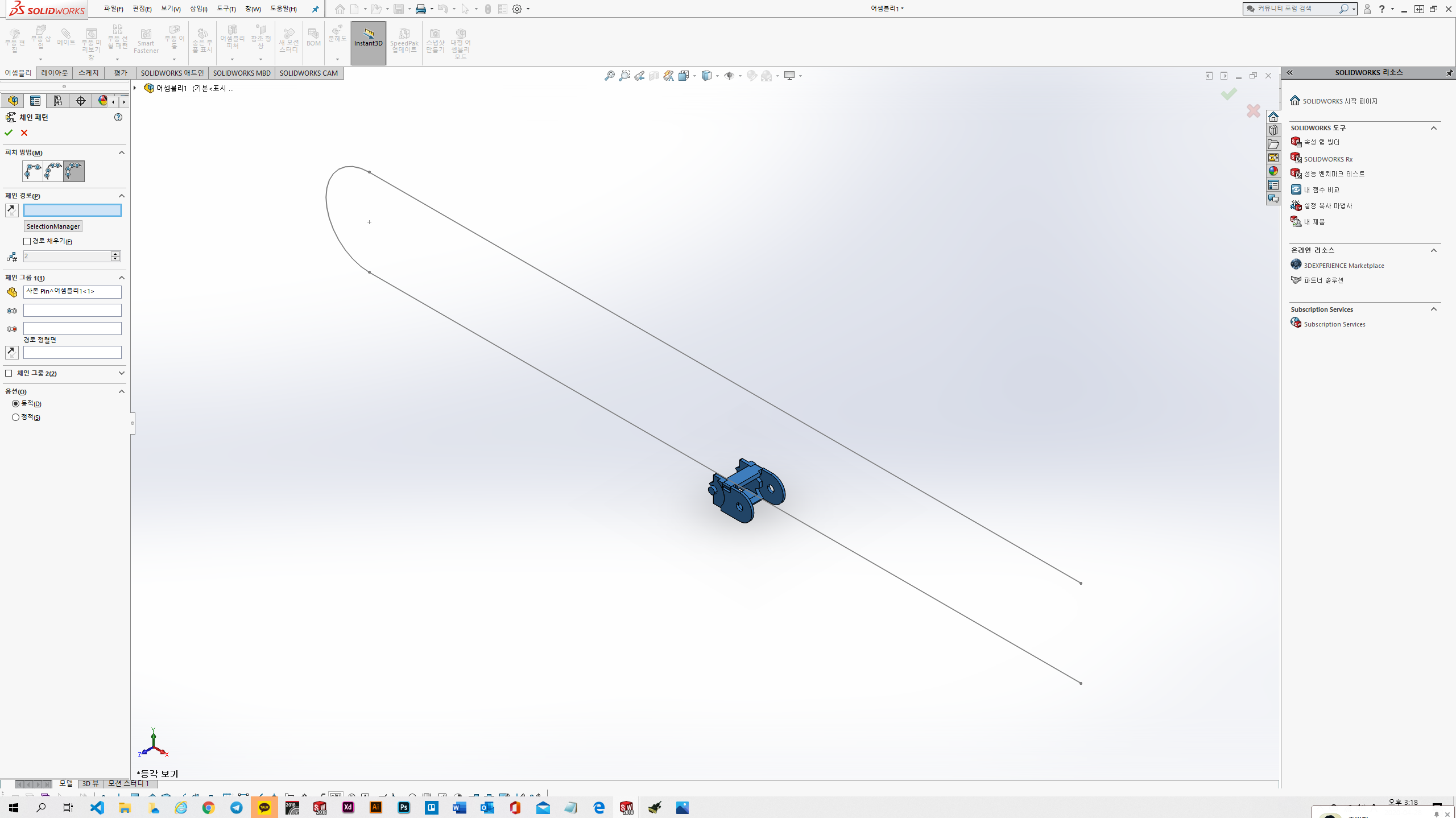
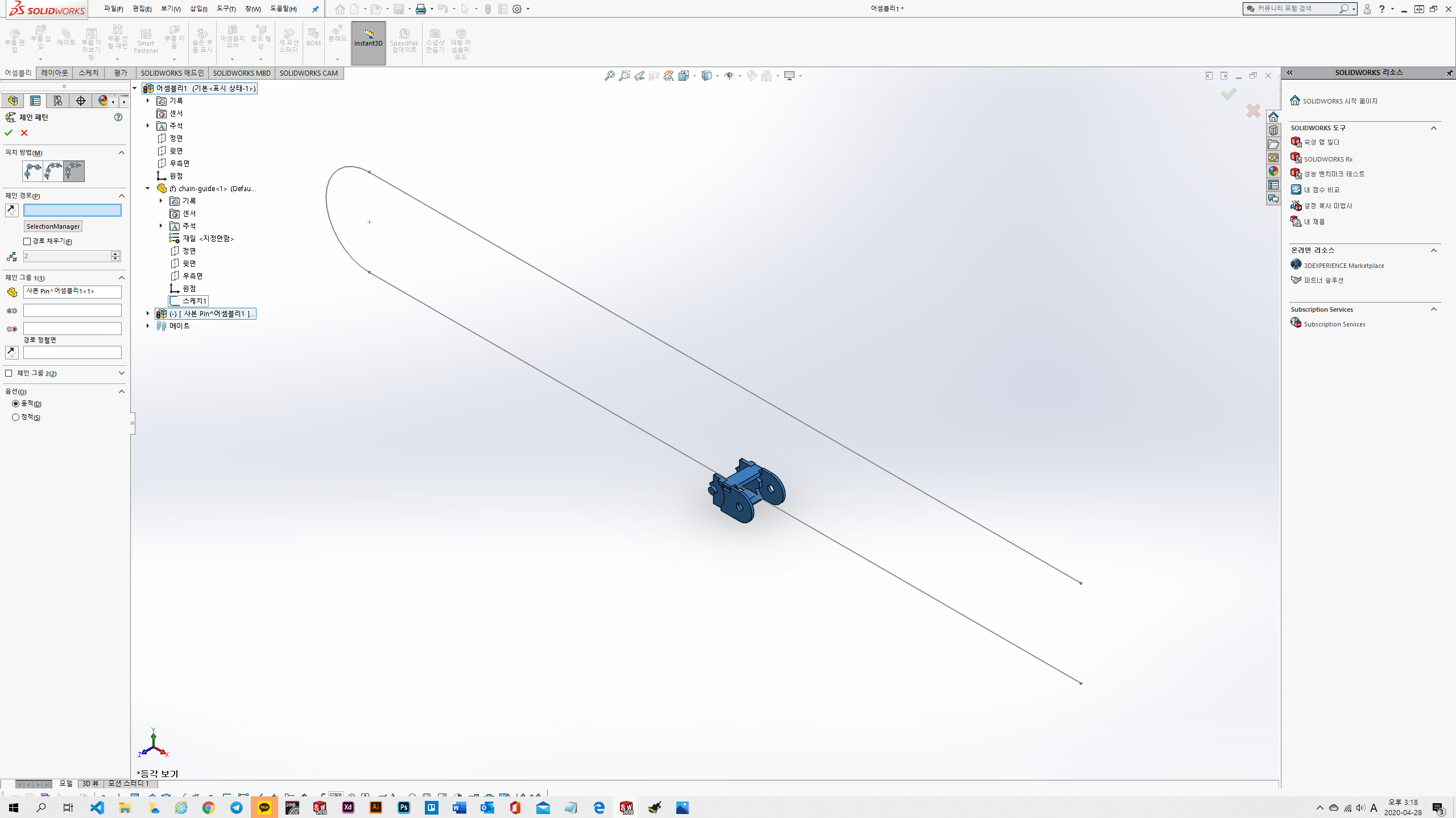
이어서 미리 그려둔 체인경로를 지정해줍니다.
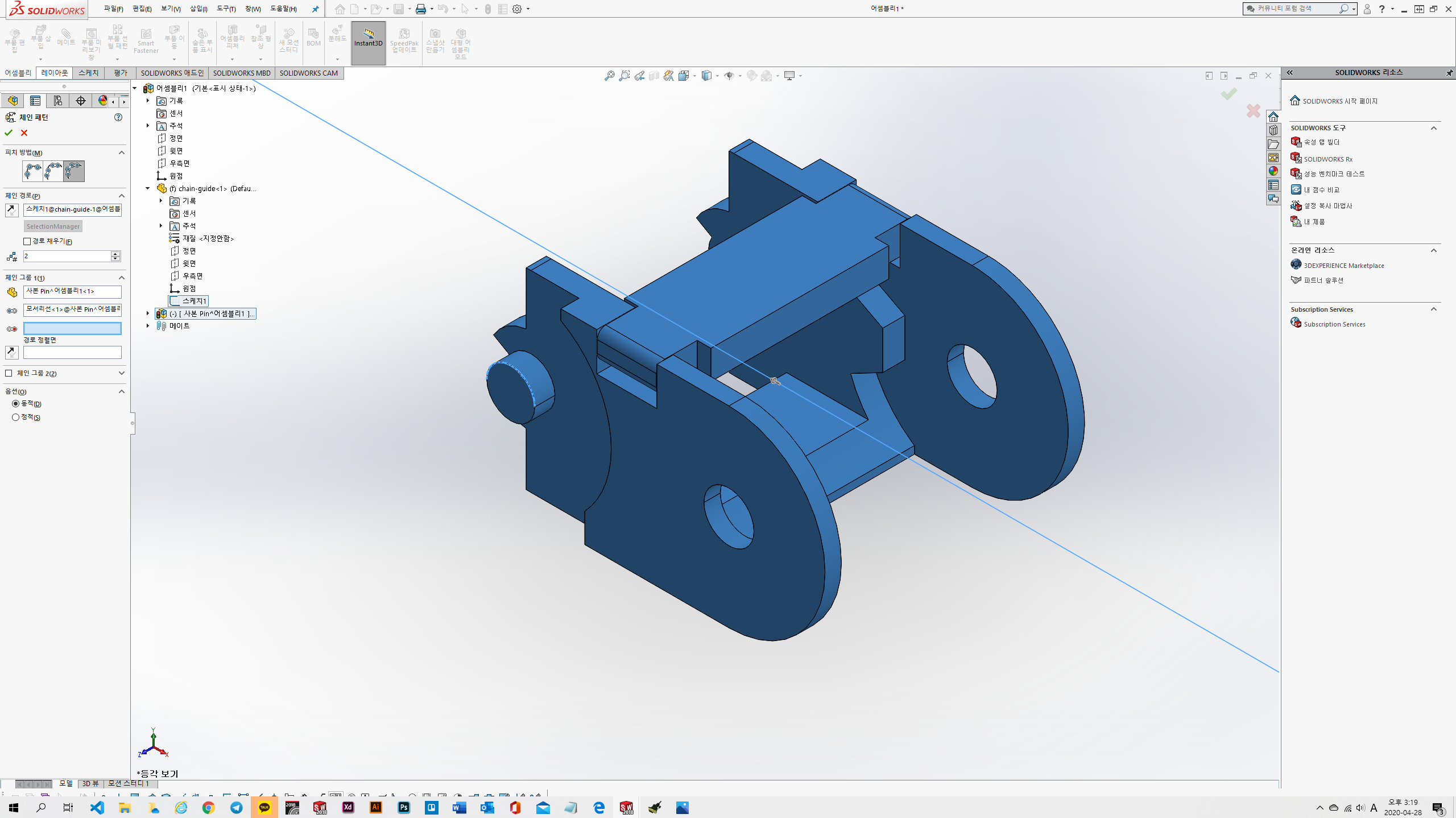
체인의 축과 구멍을 차례대로 지정해줍니다.
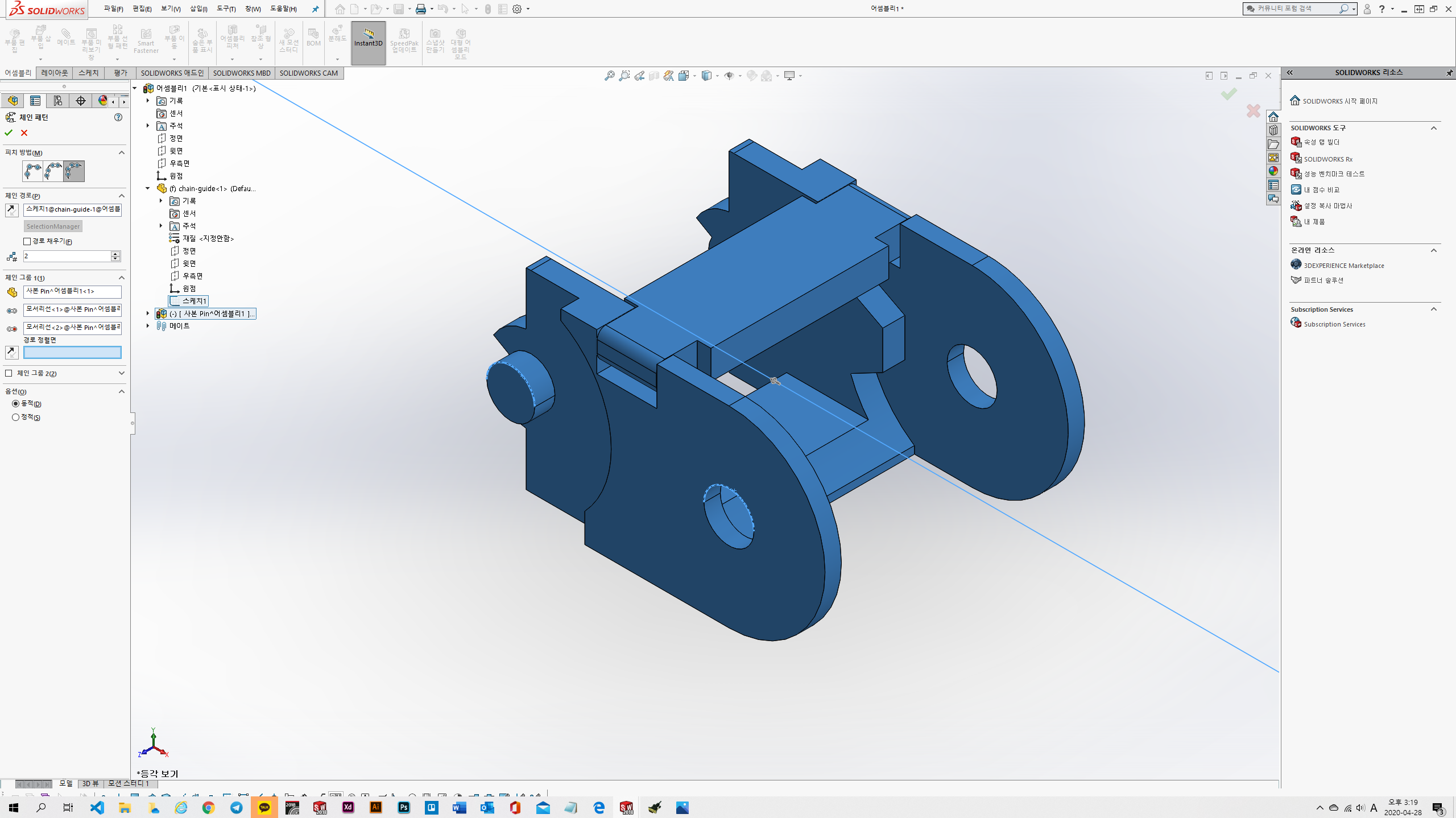
이때 경로 지정면은 경로와 일치하는면, 정면을 선택해줍니다.
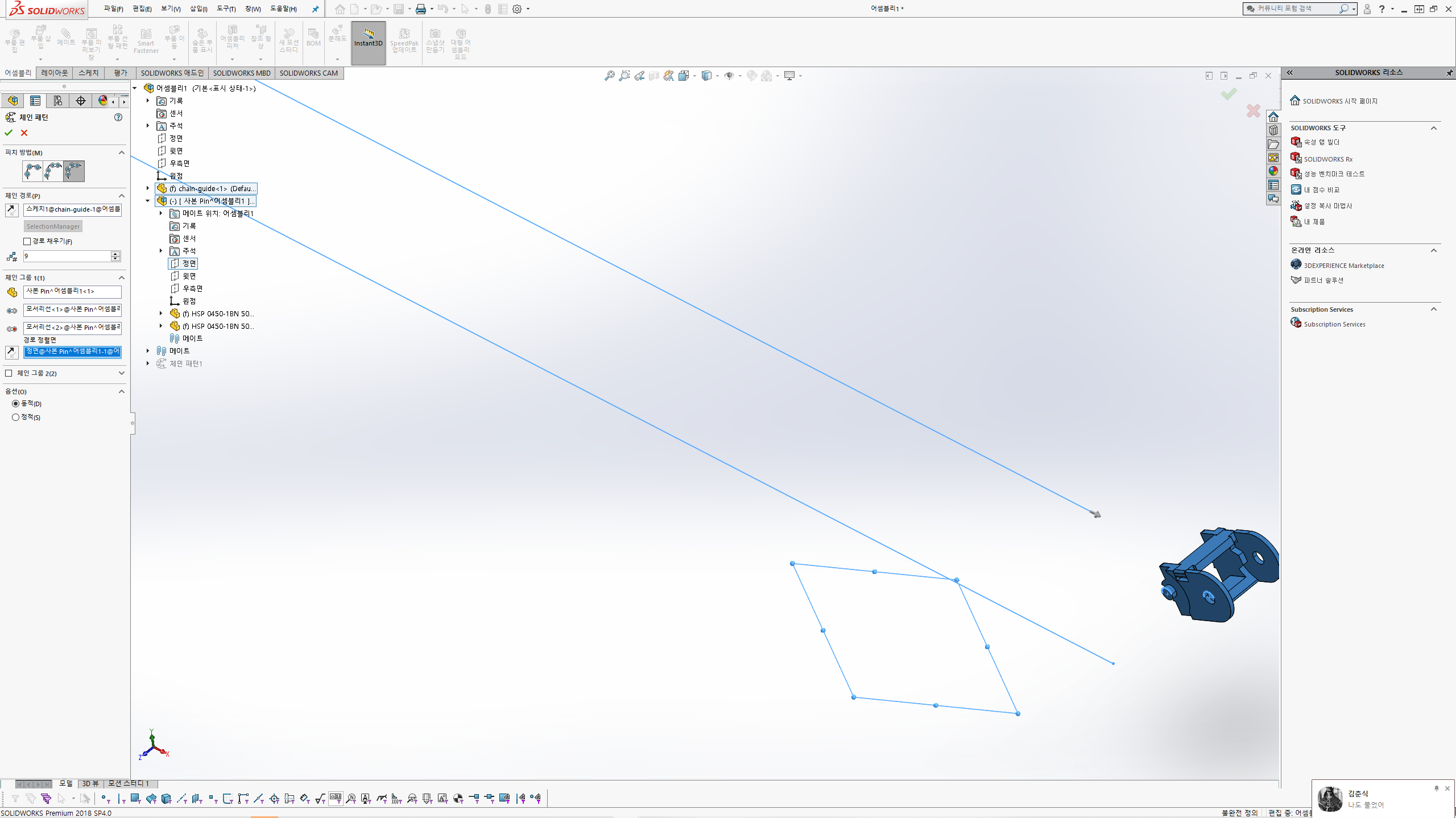
만약 체인 개수가 경로의 길이보다 많아지면 생성오류가 뜨니 조심하셔야 합니다.
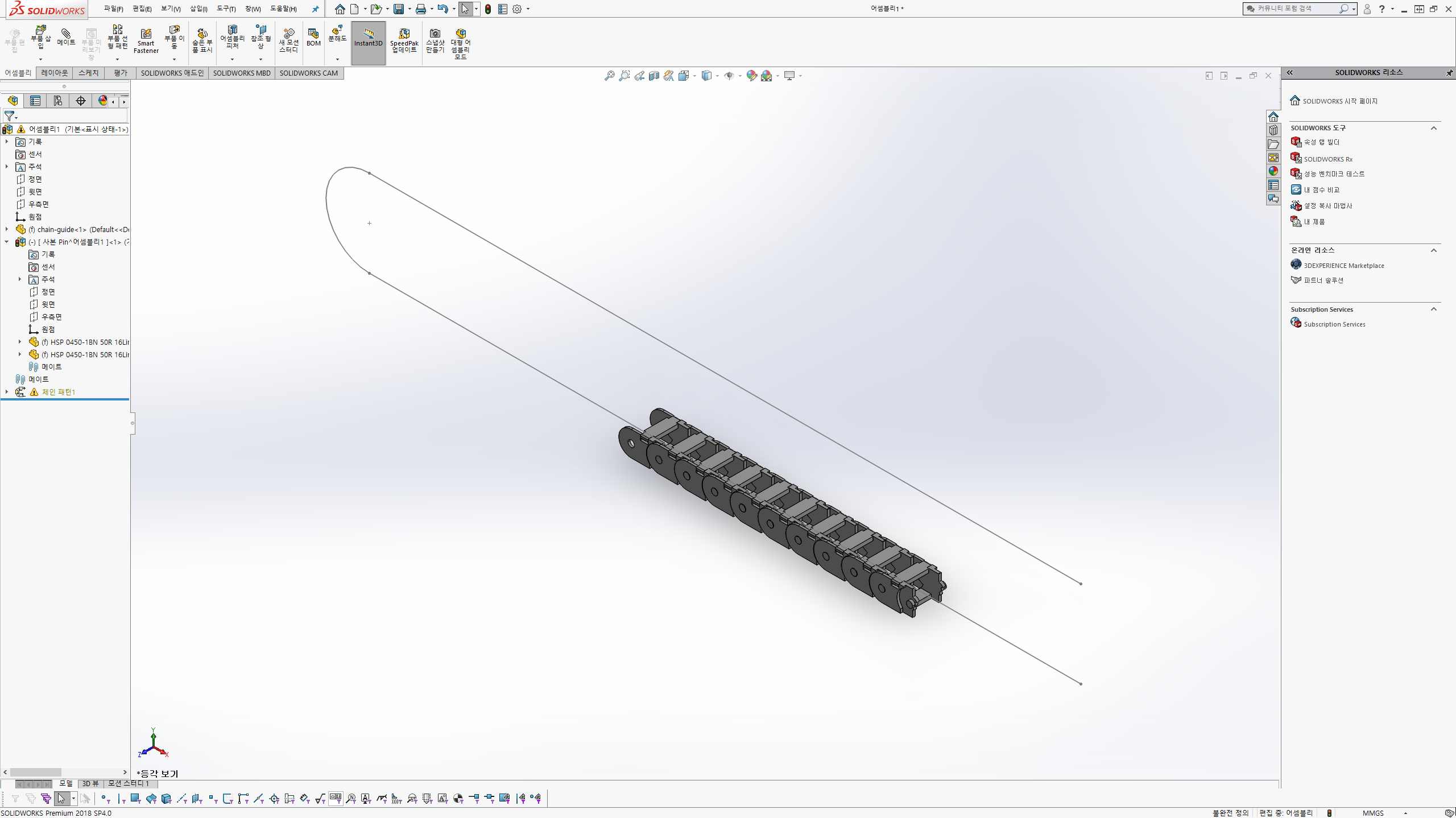
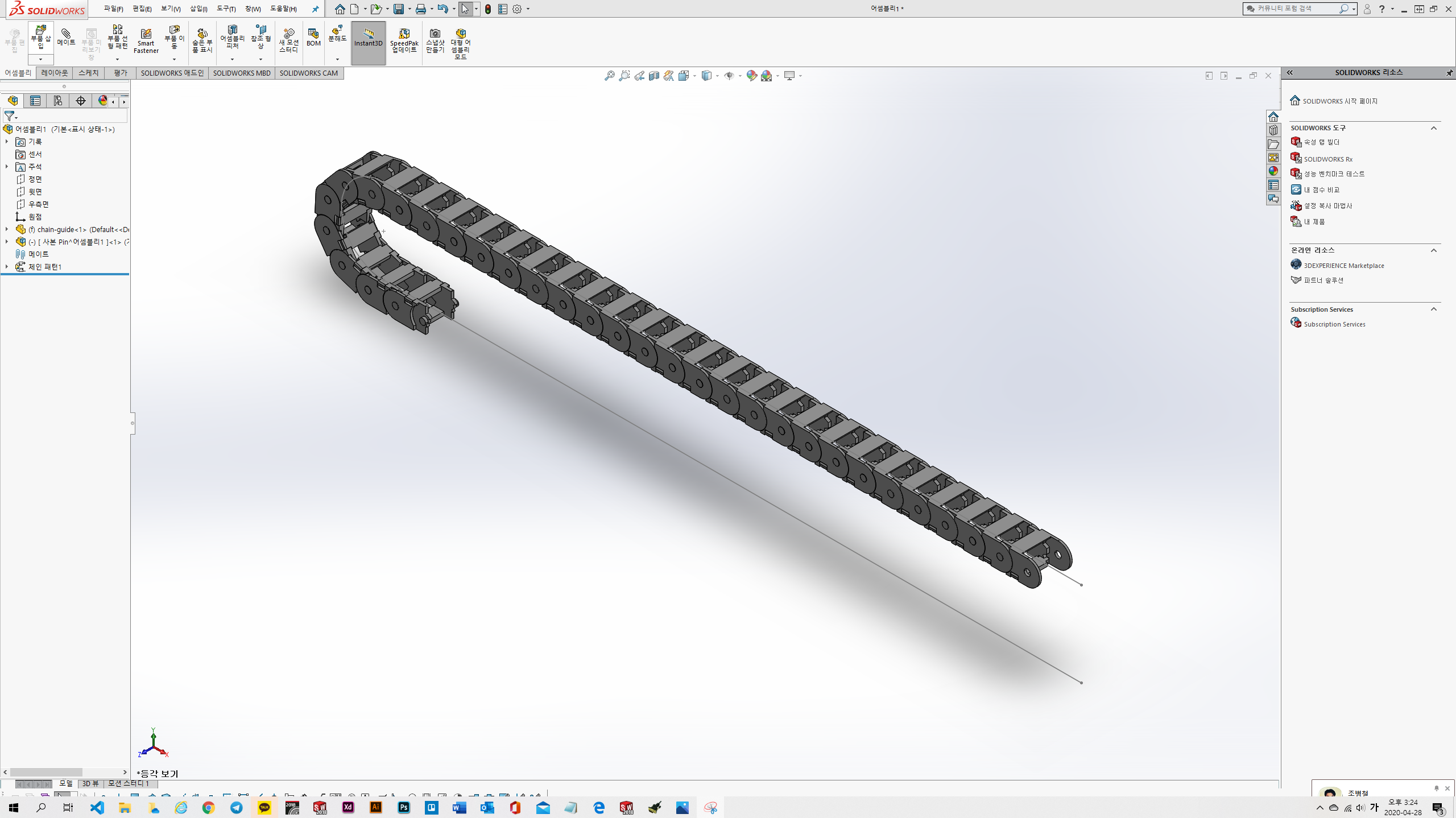
원하는 개수만큼 체인을 조정하면 사용하면 끝!
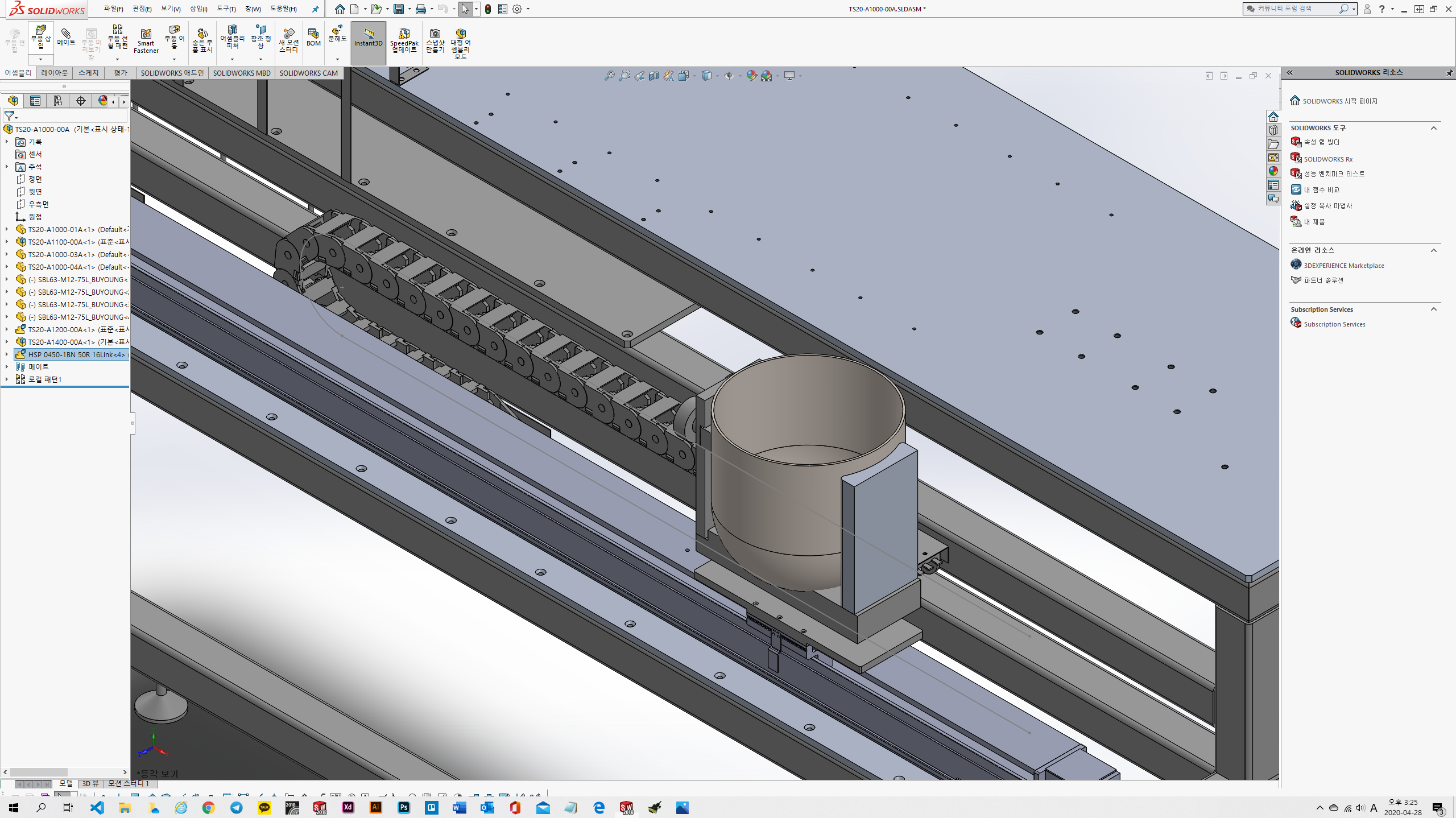
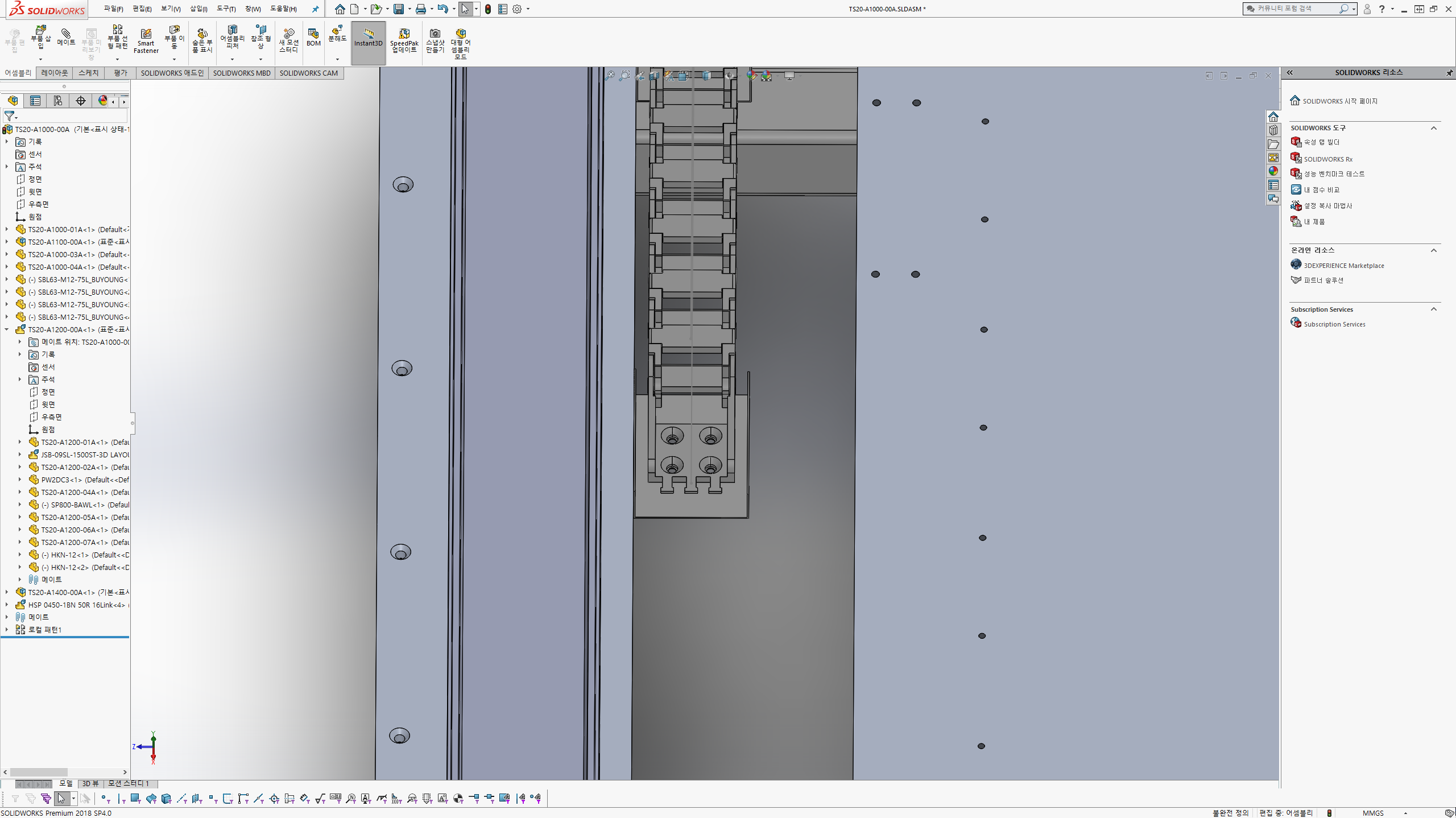
7. 생성된 체인 어셈블리 삽입하기
원하는 만큼 체인이 생성되었으면 탑 어셈블리에 체인을 삽입합니다.
체인의 카운터싱크와 부품의 탭구멍을 일치시켜주면 완성됩니다.
댓글남기기